What is Masar?
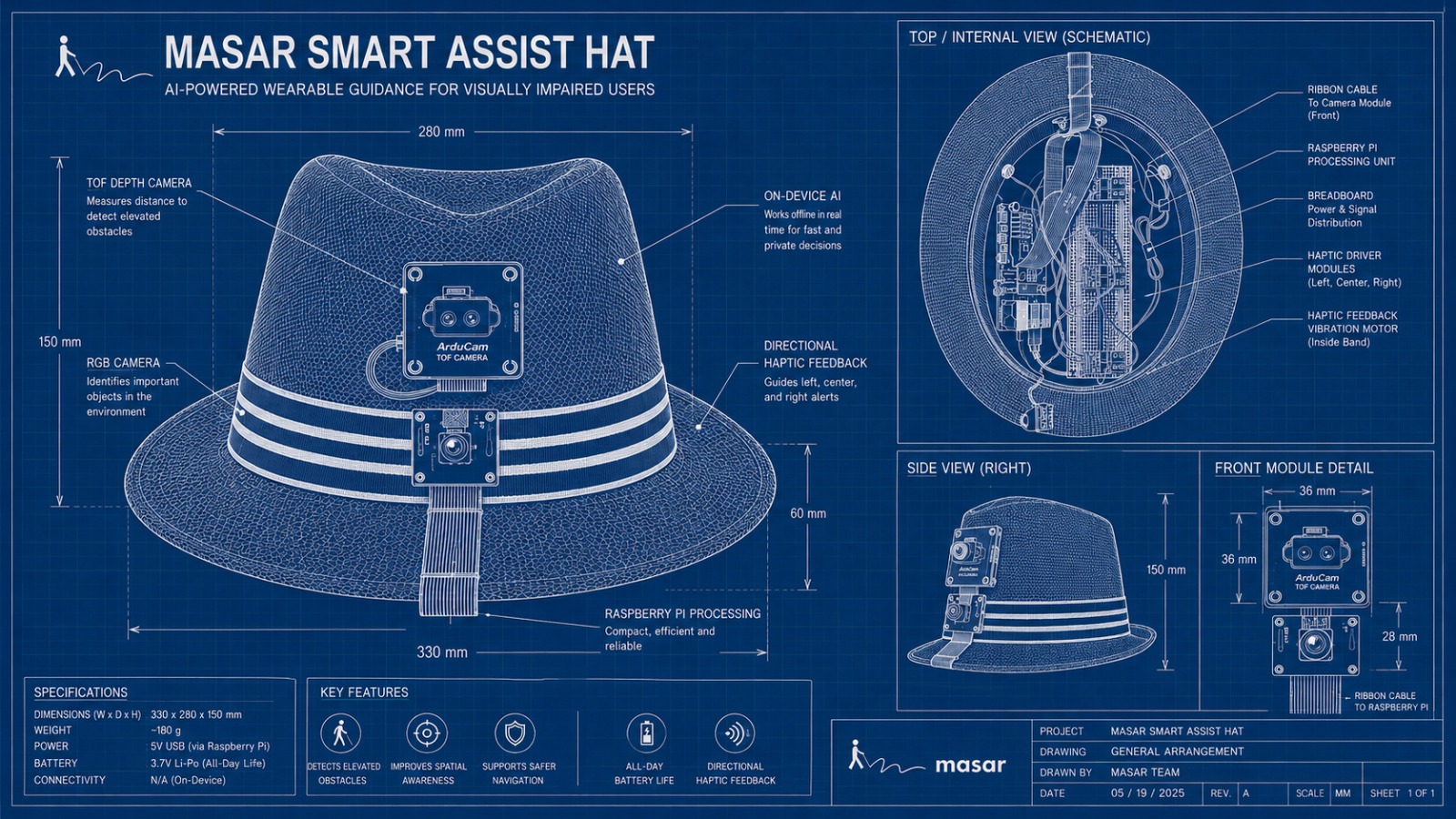
A wearable assistive system that closes the gap traditional mobility aids leave — detecting elevated obstacles through depth sensing, AI recognition, and haptic feedback.
Traditional mobility aids like the white cane are invaluable, yet they leave a critical gap: elevated obstacles. Signboards, tree branches, open cabinet doors, and head-level barriers often go undetected until impact.
Masar fills this gap. By fusing a Time-of-Flight depth camera with an RGB vision module and directional vibration feedback, it gives users real-time awareness of the space around them — not just below their feet.
Built on the Raspberry Pi 5, Masar is designed to be lightweight, practical, and accessible — a prototype that prioritizes user safety and independence above all else.